Research on Robust Environmental Recognition and SLAM in Snowy Environment
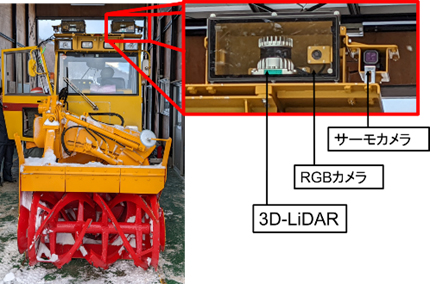
ここ最近、自動運転に関する研究が世界的に行われており、高精度な空間情報を利用したダイナミックマップ方式が主流となっています。しかしながら北海道に代表される積雪環境下では雪で走行路や標識が覆われる、さらには幅員が大きく変化する等の理由で実際の環境と空間情報に齟齬が発生し、ダイナミックマップ方式を利用することができないという問題点があります。そこで、SLAMの技術を雪道に対応させる、深層学習を用いた画像処理によってカメラ画像から走行可能領域を抽出するなどの手法を用いることによって積雪地域における自動運転技術の開発を行っています。
関連リンク:「積雪環境下における除雪機や配送車両の無人化に向けた取り組みについて」,北海道大学令和4年度第9回定例記者会見
Inspection of infrastructure using UAV

近年、高度経済成長期に施工された社会インフラの老朽化が問題となっており、その維持・管理のために点検作業が必須となっています。ドローンを用いたトンネルや橋梁の点検システムがすでに提案されており、一部はすでに実用化されています。我々は港湾環境、中でもGPSが利用できない桟橋環境に着目し、点検作業をドローンによって安全・安価に実施するための自律飛行、マップ生成、障害物回避技術などを研究しています。なお、現状ではドローンの飛行可能時間は限られており、地上移動ロボットと連携して効率的に作業することも求められています。そこで我々はドローンと移動ロボットの協調問題にも取り組んでいます。
関連リンク:UAVによる港湾設備点検の自動化を支援する高精度自己位置同定システムの開発,港湾空港総合技術センター 研究開発助成
Developing Autonomous Weeding Robot using RT and AI
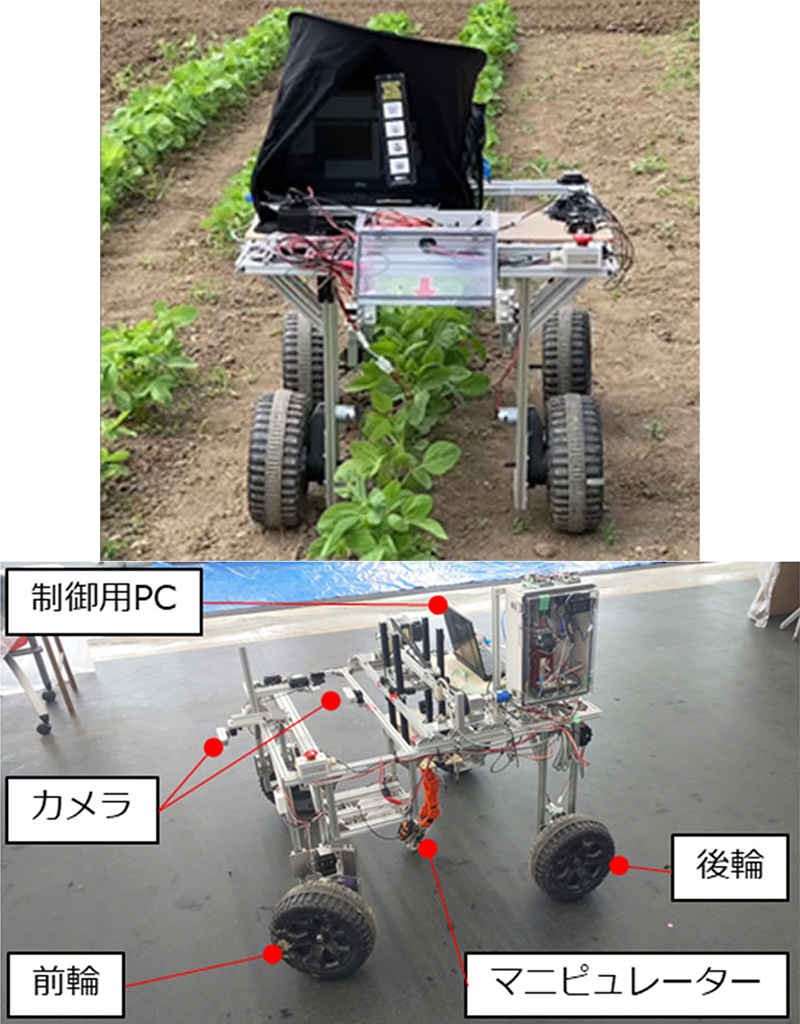
畑作農業において、除草作業は収量や品質に直結する大切な作業ですが、農作業の中でもとりわけ大きな労働負荷となっています。そのため、通常の除草には除草剤が併用されていますが、薬草栽培や有機農法などでは除草剤の使用が制限されていることから、現状では手作業による除草作業が行われています。さらには農林水産省が策定した「みどりの食料システム戦略」では2050年までに化学農薬の使用量を半減することが謳われています。このような背景から、我々は「作物と雑草を識別する深層学習技術」、「車両のロバスト制御技術」、「新たな除草機構の開発」などを行っています。
関連リンク:持続発展可能な農業をロボティクスとデータサイエンスで実現する,北大工学部広報誌
Signal processing and SLAM of autonomous robot

ロボットが自律的に環境の中を動き回るためには、センサによる外界の認識が必要不可欠です。しかし、我々が用いることのできる現実のセンサは、精度・分解能・情報の獲得にかかる時間など様々な制限があります。そこで、センサによって得られた情報に信号処理を施すことにより、センサ信号から雑音を除去し、ロボットの行動に必要な信号だけを取り出すことを行っています。さらに、センサによって得られた信号を適切に解釈し、ロボットを効率よく移動させるためには人工知能(AI)などのテクニックも重要となります。以上のことを実環境で検証するため、自律ロボットで広く用いられているレーザレンジセンサ、超音波センサ、RGB-Dカメラなどをロボットに搭載し、実験を進めています。また、未知の環境に置かれたロボットが、自己位置推定と地図生成を同時に行う問題であるSLAM(Simultaneous Localization and Mapping)に取り組むとともに、これまでのロボットでは適応が困難な複雑な環境下でも移動可能な特殊な移動機能を持つロボットの開発にも取り組んでいます。
Estimation of acceleration by a nonlinear filter ESDS and its application Link*(Journal of Robotics and Mechatronics)
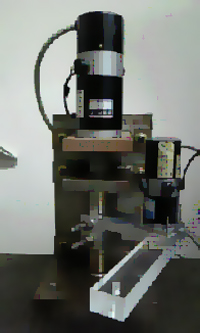
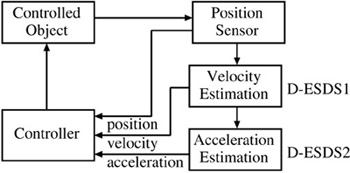
ロボットアームなどに代表されるメカニカルシステムを精度よく制御するためには,制御対象の位置・速度・加速度などを精度よく獲得する必要があります.一般的には,これらの情報はセンサによって獲得しますが,コストやメンテナンスの問題からこれらの情報を最小限のセンサで獲得し,制御系を構成する方法の研究に取り組んでいます.このために非線形フィルタESDSによる状態量推定に基づくデジタル加速度制御の研究に取り組んでいます.
関連リンク:「センサレスで実装可能な非線形補償器」,北大研究シーズ集