TOP
> Research


RESEARCH
Last Update 2009.6.4
Publications List
Research Topics
Research Field
- Robotics
- Control
- Nonlinear signal processing
Affiliation Society
- The Japan Society of Mechanical Engineers
- The Robotics Society of Japan
- IEEE
Research Topics
-
Non-linear Digital Filter, ESDS
Key Words: impulse noise, nonlinear filter,
minimum time system, differential estimator, sliding mode system.
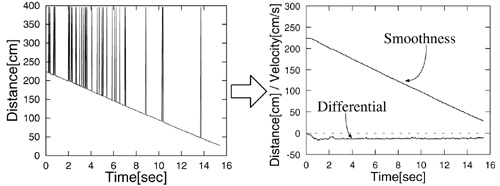
- Purpose of the research is to smooth and differentiate the
sensor inputs with impulse noise.
- We smooth the distance value by assuming the trend of the
sensor inputs.
- By using the sliding mode system, our estimator neglects the
excessive inputs and follow a input signal.
-
Integration-type Ultrasonic Wave Sensor
Key Words: ultrasonic wave sensor,
autonomous mobile robot, speed control, obstacle avoidance.
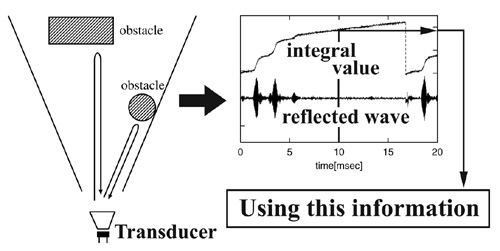
- For autonomous mobile robot, ultrasonic Time-of-flight (TOF) ranging
systems are widely used to measure distance. However, it tend to neglect
minute reflected waves below the threshold level.
- We have proposed a technique to utilize the minute reflected waves
by integrating the reflected waves. We named it integration-type
ultrasonic wave sensor.
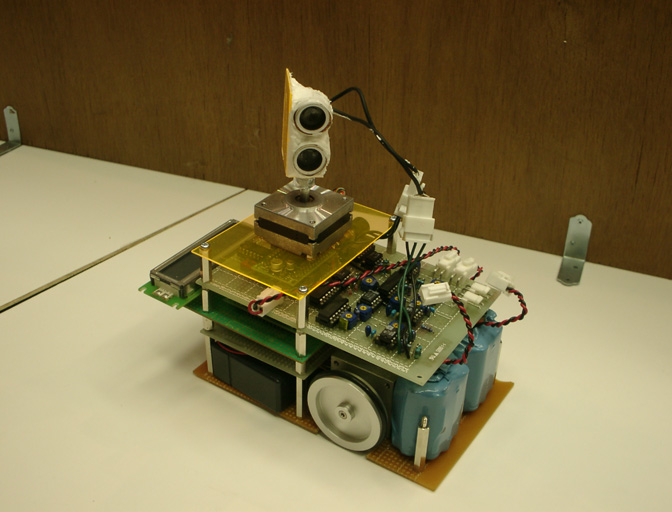
- We propose speed control and obstacle avoidance of a sonar-based
mobile robot by using integration-type ultrasonic wave sensor.
-
Robot Navigation
Key Words: navigation, local landmark,
topological map, autonomous mobile robot, behavior-based robot,
potential function method, graph map.
- We discuss decision making for a behavior-based robot with modules
which determining robot action.
- We use Potential Function, in which maximum votes are collected from
modules. Using event-driven state transition, the robot decides its
action with appropriate sets of modules changed based on situation.
- We apply this to navigation tasks in a corridor and show simulation
results. When we give a map and path designation to the robot,
we use a handwriting map interface.
-
Digital Acceleration Control
Key Words: digital acceleration control,
differential estimator, filter, sensor, robot manipulator.
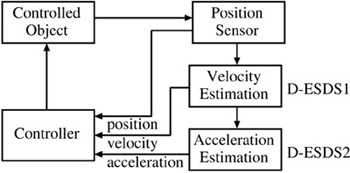
- Digital acceleration control has been proposed in order to control
non-linear mechanical systems such as robot manipulators.
- It requires position, velocity, and acceleration of controlled
object in order to construct a controller.
- Not all mechanical systems can obtain the information of velocity or
acceleration of controlled object.
- So, we use position sensor and differentiate it by using filtering
technique. As a filter, we use nonlinear digital filter, ESDS that
is based on sliding mode technique.
- It estimates smoothed and differential value of noisy input signal,
but more accurate estimation is required to implement the controller.
Therefore, we propose the Difference value tracking ESDS (D-ESDS)
that is superior to estimate the differential value.
-
Image Processing
Key Words: image processing, impulse noise,
nonlinear filter, median filter, image restoration.
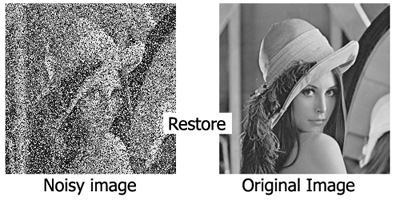
- The purpose of this research is noise removal, particularly
removal of impulse noise, from corrupted images.
- Our approach utilizes the trend of images instead of order statistics,
and it is constructed on the basis of a nonlinear digital filter
termed ESDS.
- The proposed approach can respond to abrupt input signal using the
differential information calculated by ESDS.
Takanori Emaru :
 (c) Laboratory of Robotics and Dynamics, Hokkaido University
(c) Laboratory of Robotics and Dynamics, Hokkaido University