
Mobile robots are expected to use in our daily life widely. However, there are still so many problems to overcome. SLAM (Simultaneous Localization And Mapping) is one of the important problems and we are studying this problem by using a mobile robot with laser range sensors. We have proposed algorithms for muti-robot collaboration and are studying collaboration between UAV and UGV as well. We have also developed several types of mobile robots by ourselves, for example, a mobile robot having a manipulator and a mobile robot platform with omni-directional wheels.
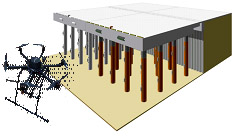
In case of inspection of pier structure, UAV has to localize itself without GPS signal because of the ceiling. On the other hand, UAV can use GPS signal to localize itself when perform inspection of breakwater. We have developed a platform that has common sensors for pier and breakwater inspection and is able to change the usage of sensors for data acquisition and localization.

Recognition of the traffic lanes is important for the self-driving car development. We challenge the project how to achieve recognizing all the objects covered by the snow based on the use of camera data only. We focus on how to apply semantic segmentation to autonomous vehicles in the snowy environment and compares two algorithms based on the newly created database. Those two algorithms are Fully Convolutional Networks (FCN) and Image Cascade Network (ICNet). We also use Lidar and other sensors to improve the recognition results.
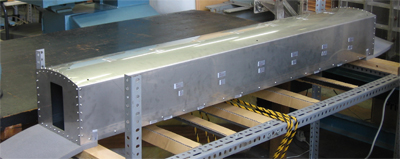
Lightweight railway vehicles have complex flexural vibration characteristics. We have developed the simple structure model based on the transfer matrix method to analyze bending vibrations of the railway vehicle carbody.
We have made a 1/12 size carbody model for experimental study. Experimental modal analysis is applied to measure vibration characteristics of the model.
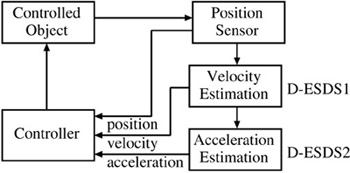
Proportional-Integral-Derivative (PID) control is widely used to control mechanical systems. In PID control technique, however, there are limits to the accuracy of the resulting movement because of the influence of gravity, friction, and interaction of joints caused by modeling errors. Digital acceleration control has robustness for the modeling errors. But it requires position, velocity, and acceleration of a controlled object to construct a controller.
We propose the novel digital differentiator, ESDS. It enables digital acceleration control without increasing the number of sensors. Furthermore, the proposed method works effectively for quantized sensor data.